

If we ever expect the uncrewed aviation industry to be profitable, the notion of “one aircraft, one pilot” must be replaced by the more realistic “one pilot, many aircrafts” doctrine. This implies a lot of autonomy for each aircraft with the role of the pilot to simply to keep an eye on certain parameters that would spell trouble or conflict with other objects, either airborne or ground based.
That is why the issue of autonomy is ever-present in every conversation about the financial viability of remotely piloted aircraft.
The Philadelphia-based company EXYN Technologies recently published a whitepaper that outlines in detail the issues surrounding autonomy in bot ground and aerial forms. The document begins by defining autonomy in a way that frames the conversation correctly:
“Autonomy is the ability to think for yourself and be self-reliant. The capacity of self-governance or self-determination. There are different arenas of autonomy, but the one we’re most concerned with is personal autonomy—the capacity to decide for oneself and pursue a course of action in one’s life. That’s ultimately what we’re trying to achieve through our work in autonomous robotics: to create an artificial intelligence platform that can operate a robot in dangerous environments, complete multiple operations successfully, and take care of itself with minimal or no human interaction.”
An issue that is raised and explained correctly in the document is the difference between autonomy and automation.
“Both terms (Autonomy and Automation) are thrown around interchangeably, but in reality they are two completely different things. Automation has been around for quite some time, and corresponds to a machine performing a programmed action, and is not limited to aerial machines. For example, a machine in a production line that performs a step in the car building process. Or, in an aerial example, autopilot on a commercial airliner. It instructs the aircraft to stay on a chosen course and altitude, but a pilot must be present to monitor a variety of other conditions to achieve a successful flight and landing.”
This is the case today with Part 121 and Part 135 in which pilots basically take off and land the aircraft with the majority of the flight conducted automatically by the autopilot under the supervision of the pilot or pilots, as they input changes in heading and altitude as instructed by Air Traffic Control (ATC).
- The robot must be aware of its own sensors and state (operational integrity)
- Decision to launch/complete a mission dependent on the health of the robot
- Decision to launch/complete a mission dependent on the health of the robot
- The robot must sense and react to its environment without human assistance
- The robot must perform its mission successfully without human assistance
- The robot must reliably repeat missions without human assistance
- The robot must be able to keep itself out of harmful situations unless designed otherwise
- In more advanced levels of autonomy, the robot must be able to complete its mission in more challenging environmental conditions.
- More advanced levels of autonomy would feature the robot foraging for its own food (energy) and spare parts, maintaining its operational integrity
- Above everything else, the robot must keep people safe, and sacrifice itself for their safety
Even though the document does not explicitly mention it, this last bullet resembles the premise of the three laws of robotics, first established by Issac Asimov in his now famous book “I Robot,” published in 1950 and later made into a movie with very little resemble to the nature of the book.
The document defines the five different levels of aerial autonomy in a very useful graph that clearly outlines the requirements to achieve each:
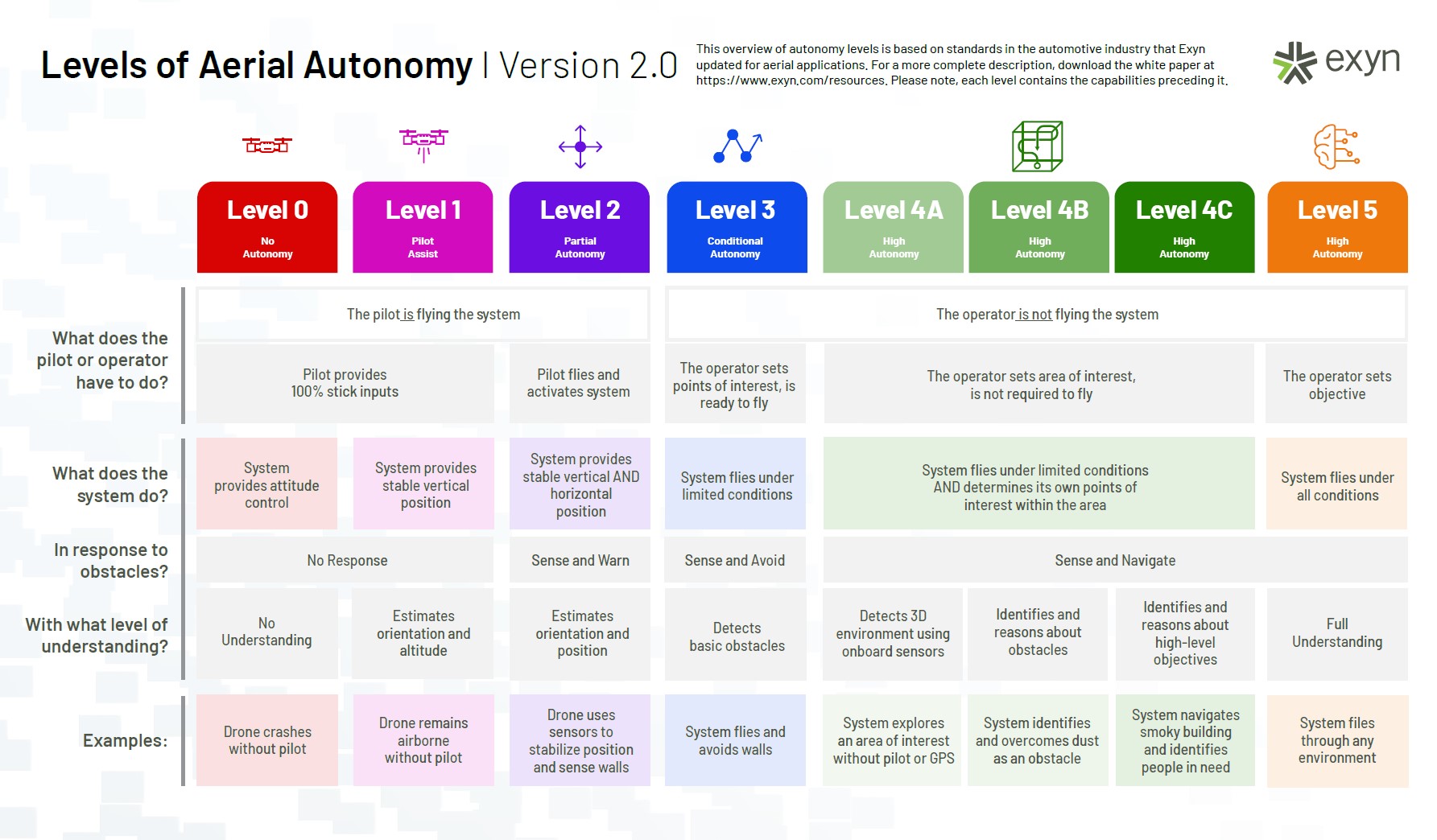
For the uncrewed aviation industry to really flourish in the Part 108 era, flights will have to be as autonomous as possible in order to reduce the necessary human headcount to make flights happen with acceptable levels of safety. This level of autonomy will have to be either 4 or 5, according to the document and the conclusions reached by the authors are a clear delineation of the path to take.
“In the early levels of aerial autonomy, the main differentiators between them are the capabilities of the system to take over control of the robot. You can see this in how the human operator is receding farther away from overall control, and they’re only needed in an emergency situation. But Levels 4 and 5 are remarkably similar. The main differentiator is in the operating environment the robots are capable of flying in. To achieve Level 5 Autonomy, a UAV must repeatedly demonstrate successful flights in any environment without requiring interaction or assistance from a pilot or operator. Achieving this Level of autonomy will likely require advances in nearly all elements of a Level 4 stack from motion planning to advanced perception. The goal is to enable a system to exhibit safe behavior through degenerate, degraded visual environments and under high levels of environmental and system uncertainty. It is a formidable challenge.”
Now that we have a clear definition of what levels of autonomy are necessary for the industry to flourish and having the technology to make it happen, all we need to do is set a course of action that would allow uncrewed aircraft to perform their missions under supervision but in complete control of the planned objective and the capacity to deal with eventualities. Exciting times ahead!
You can find a copy of the EXYN Whitepaper here: https://www.commercialuavnews.com/reports/levels-of-aerial-autonomy-4b










Comments